Công nghệ khoan ngầm robot xuyên qua đường
Mole-bot, một robot khoan ngầm xuyên qua đường phỏng sinh học khoan được thiết kế bởi KAIST (Viện Khoa học và Công nghệ Tiên tiến Hàn Quốc), tự hào có một ống xương mập mạp,..
Ngày đăng: 28-12-2020
2,088 lượt xem
Công nghệ khoan ngầm robot xuyên qua đường thi công khoan ngầm bằng robot phỏng sinh học (bio-inspired) – ứng dụng robot khoan của KAIST, phù hợp cho hồ sơ công nghệ, nghiên cứu kỹ thuật hoặc tài liệu chuyên ngành.
Mole-bot, một robot khoan ngầm xuyên qua đường phỏng sinh học khoan được thiết kế bởi KAIST (Viện Khoa học và Công nghệ Tiên tiến Hàn Quốc), tự hào có một ống xương mập mạp, thắt lưng nghiêng về mọi phía và chi trước mạnh mẽ. Hơn hết, mô-men xoắn mạnh mẽ từ mũi khoan có thể mở rộng bắt chước khả năng đục của răng cửa của chuột chũi làm nổi bật tính năng tốt nhất của robot khoan.

Khoan robot Mole-bot dự kiến sẽ được sử dụng để thăm dò không gian và khai thác các tài nguyên dưới lòng đất như khí mê-tan trong lòng than và các nguyên tố đất hiếm (REE), vốn đòi hỏi công nghệ khoan xuyên đường tiên tiến trong môi trường phức tạp.
Sức mạnh nghiền nát của răng chuột chũi châu Phi mạnh đến mức chúng có thể đào một cái hố với sức mạnh gấp 48 lần trọng lượng cơ thể. Chúng tôi đã sử dụng đặc điểm này để xây dựng công cụ khai quật chính. Và mũi khoan có thể mở rộng của nó được thiết kế để không va chạm với chi trước của nó.
Mole-bot rộng 25 cm và dài 84 cm có thể đào nhanh hơn ba lần với độ chính xác định hướng cao hơn sáu lần so với các mô hình thông thường. Mole-bot nặng 26 kg. Sau khi đào, robot khoan ngầm loại bỏ đất và mảnh vụn đã đào bằng cách sử dụng chi trước của nó. Tính năng cơ nhúng này, lấy cảm hứng từ xương vảy của chuột chũi châu Âu, chuyển đổi chuyển động tuyến tính thành một lực quay mạnh mẽ. Đối với khoan định hướng, phần eo thon dài của rô bốt thay đổi hướng 360 ° giống như động vật có vú sống.
Để khám phá môi trường dưới lòng đất, nhóm nghiên cứu đã phát triển và áp dụng các hệ thống cảm biến và thuật toán mới để xác định vị trí và định hướng của robot bằng cách sử dụng công nghệ Bản đồ và Bản đồ Đồng thời 3D (SLAM) dựa trên đồ thị phù hợp với chuỗi từ trường của Trái đất, cho phép điều hướng tự động 3D dưới lòng đất .

Sự tăng trưởng của thị trường khoan ngầm, bắt đầu từ cuộc Cách mạng Đá phiến, có khả năng mở rộng sang sự phát triển trong tương lai của không gian và tài nguyên vùng cực. Như Space X đã khởi xướng gần đây, sự chú ý nhiều hơn đến việc khám phá hành tinh sẽ ngày càng gia tăng và thị trường công nghệ và thiết bị liên quan của nó cũng sẽ tăng lên.
Mole-bot là một bước tiến vượt bậc cho các công nghệ khoan ngầm robot và thăm dò dưới lòng đất hiệu quả. Không giống như các quy trình khoan ngầm thông thường sử dụng các hợp chất bùn không thân thiện với môi trường để làm sạch các mảnh vụn, Mole-bot có thể giảm thiểu sự tàn phá môi trường. Các nhà nghiên cứu cho biết hệ thống của họ tiết kiệm chi phí và nhân công và không cần thêm đường ống dẫn hoặc thiết bị phụ trợ khác.
Máy in 3D robot khoan ngầm đang giúp thúc đẩy thế hệ xây dựng tự hành tiếp theo.
Gần đây, ngành công nghiệp in 3D đã chứng kiến những ngôi nhà được in 3D trong 24 giờ hoặc ít hơn và những cây cầu được làm từ nhựa nóng chảy. BADGER là dự án mới nhất trong số những dự án cố gắng đưa in 3D vào xây dựng. Doanh nghiệp toàn châu Âu tập hợp một nhóm tập trung vào việc chế tạo một robot có khả năng khoan và in 3D đường hầm để cung cấp khí đốt, cáp viễn thông và đường ống nước.
BADGER là gì?
BADGER là từ viết tắt của “roBot for Autonomous nDerGround trenchless opERations cho các tùy chọn tùy chọn, lập bản đồ và điều hướng không rãnh”.
Được điều phối bởi Đại học Carlos III của Madrid, dự án được hỗ trợ bởi một nhóm gồm bảy công ty và tổ chức nghiên cứu, bao gồm các chuyên gia về ‘công nghệ nốt ruồi’ của Đức là Tracto Technik và Đại học Glasgow ở Anh.
Việc phát triển hệ thống bắt đầu vào tháng 2 năm 2017 sau khi BADGER giành được một trong tám vị trí trong Chương trình khung về Nghiên cứu và Đổi mới của Liên minh Châu Âu 2020. Các dự án khác đã giành được tài trợ của Horizon 2020 bao gồm chương trình chế tạo kính mắt tùy chỉnh và Dự án BARABARA nghiên cứu sản xuất sợi máy in 3D tái chế. Là một phần trong thỏa thuận của BADGER, EU đã cấp cho công ty 3,7 triệu € (tương đương 4,38 triệu USD) tài trợ. Số tiền này sẽ được chia trong ba năm.
Công nghệ khoan ngầm robot xuyên qua đường
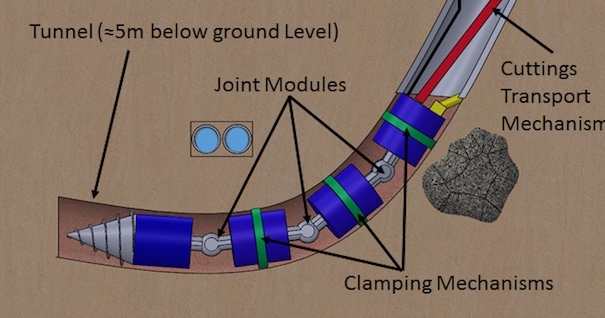
Trong tác phẩm nghệ thuật khái niệm hiện tại, robot khoan BADGER có bốn mô-đun. Ở đầu là một mũi khoan - một phiên bản thu nhỏ của thiết bị dùng để làm đường hầm xe lửa.
Ở giữa có hai đoạn kẹp, được thiết kế để giữ cho mũi khoan ở đúng vị trí khi nó khoan qua đất. Phân đoạn cuối cùng là mô-đun máy in 3D. Mô-đun này in 3D các bức tường trong sự thức dậy của BADGER.
Mô-đun này được định nghĩa là “một rô-bốt đi theo được trang bị đầu máy in và một tay máy hình trụ” có khả năng xây dựng các bức tường bằng “vật liệu phụ gia (nhựa thông hoặc chất khác)”. Điều hướng dưới mặt đất sẽ được xác định bởi một trạm biến áp trên mặt đất, giao tiếp với máy khoan bằng Radar xuyên mặt đất (GPR). Mục tiêu đến cuối năm 2019 là có một hệ thống đào hầm BADGER có khả năng tự chủ và sẵn sàng đưa ra thị trường.
Xác định vị trí các đường ống ngầm tiện ích hiện có
- Điều quan trọng là phải biết các đường ống tiện ích hiện có có thể nằm ở đâu trước khi bắt đầu bất kỳ hoạt động khai thác hoặc khoan ngầm robot nào. Các công nghệ như Radar xuyên đất (GPR), Máy khoan định hướng…
- Cảm ứng điện từ phía Nam (EMI) và đào thủy lực được sử dụng để chỉ định (“đánh dấu”) và khám phá (“ánh sáng ban ngày”) các tiện ích dưới bề mặt hiện có. Đánh dấu thích hợp và xác định vị trí vé hợp lệ là một khía cạnh quan trọng để giảm rủi ro của các hoạt động nhàm chán về phương hướng.
Khảo sát địa điểm
- Trước khi lập kế hoạch làm việc, một quản đốc hoặc người quản lý dự án nhàm chán tiến hành khảo sát địa điểm để đảm bảo rằng tất cả thông tin có thể biết về công trường và các tiện ích hiện có đã được xem xét. Sự hiện diện của vòi nước, hộp tiện ích hoặc các tính năng bên trên khác được điều hòa với các vị trí đã thực hiện trước đó để đảm bảo rằng không có gì bị bỏ sót. Một số tiện ích bị chôn vùi có thể được khai quật chân không để xác minh trực quan độ sâu, vị trí và hướng của chúng.

Khoan định hướng
- Định vị khoan
- Tiến hành dàn khoan định hướng, ống dẫn / ống dẫn và thiết bị phụ trợ trong khi bùn khoan được trộn để chuẩn bị cho hoạt động khoan. Các hố ra vào có thể được đào vào lúc này.
- Người vận hành máy khoan định hướng bằng robot có kinh nghiệm và bộ định vị đầu khoan dẫn đầu hoạt động khoan. Khi đầu khoan xuyên qua đất, các cần khoan bổ sung được thêm vào khi cần thiết để kéo dài chiều dài của đường khoan.
- Người điều khiển máy khoan điều khiển đầu máy khoan bên dưới và xung quanh các chướng ngại vật hiện có và các tiện ích bị chôn vùi bằng cách sử dụng dữ liệu hướng dẫn được cung cấp bởi một đèn hiệu điện tử nằm bên trong đầu máy khoan.
- Khi đường khoan đến ga cuối của nó, đầu khoan sẽ thoát ra tại một vị trí xác định trước.
- Đầu khoan máy khoan định hướng ngang RHDD được thay thế bằng mũi doa và được gắn vào đường ống / ống dẫn để lắp đặt thông qua một khớp xoay. Bùn ( dung dịch khoan) trong lỗ khoan được bơm qua các thanh khoan để giữ cho lỗ khoan mở và cung cấp dầu bôi trơn trong khi đường ống / ống dẫn được kéo trở lại qua đường dẫn ban đầu. Việc lắp đặt đường ống / ống dẫn lớn hơn có thể yêu cầu thêm doa kéo lùi trước khi kéo ống / ống dẫn.
- Bùn ( dung dịch khoan) và chiến lợi phẩm bên ngoài được loại bỏ bằng máy xúc chân không. Các đặc điểm bề mặt như nhựa đường, nhựa đường và lề đường được khôi phục lại tình trạng ban đầu.
- Một báo cáo bằng văn bản nêu chi tiết các tiện ích được cài đặt cùng với nhật ký lỗ khoan cho biết thông tin về độ sâu và đường dẫn được cung cấp cho khách hàng.
Nhóm nghiên cứu của GE đã thiết kế một mẫu thử nghiệm và thực hiện một số cuộc trình diễn quy mô phòng thí nghiệm ban đầu về robot đào hầm xuyên qua bụi bẩn. Mục tiêu của dự án là trình diễn một robot có thể di chuyển với tốc độ 10 cm / giây và đào một đường hầm dài 500 mét và đường kính ít nhất 10 cm.
Công Ty Minh Phương Corp cho biết các công nghệ đang được phát triển trong dự án này sẽ không chỉ giúp cải tiến công nghệ khoan ngầm robot HDD mà còn cả khả năng kiểm tra và sửa chữa nâng cao bằng cách sử dụng robot khoan ngầm.
Bộ phận thiết kế công Ty Minh Phương Corp cho biết: “Thiết kế robot mềm mà chúng tôi đang tạo ra sẽ có nhiều mức độ tự do di chuyển hơn so với các robot có khớp nối thông thường. “Ví dụ, một trong những lý do khiến bạch tuộc có thể chui qua những không gian nhỏ như vậy là chúng không có xương. Điều tương tự cũng áp dụng cho các robot khoan mềm, có thể rất thuận lợi khi bạn muốn tiếp cận những nơi nhỏ như bên trong động cơ phản lực hoặc tuabin điện để kiểm tra và sửa chữa phức tạp. ”
GE đã phát triển và thử nghiệm thực địa các robot khoan ngầm HDD giống rắn mới để kiểm tra và sửa chữa động cơ phản lực. Những robot khoan ngầm có tính linh hoạt cao này cho phép truy cập vào các môi trường hạn chế và lộn xộn ở các quy mô chiều dài khác nhau - từ milimét đến vài mét, do đó cho phép thực hiện nhiều hoạt động bảo trì tại chỗ mà không yêu cầu xé nhỏ và lắp ráp lại các đường ống ngầm tốn kém.
THI CÔNG KHOAN NGẦM BẰNG ROBOT PHỎNG SINH HỌC – CÔNG NGHỆ ĐỘT PHÁ TỪ KAIST VÀ ỨNG DỤNG XUYÊN ĐƯỜNG TRONG HẠ TẦNG NGẦM
Trong những năm gần đây, cùng với sự phát triển mạnh mẽ của công nghệ robot và trí tuệ nhân tạo, lĩnh vực thi công khoan ngầm đã có những bước tiến vượt bậc. Một trong những xu hướng nổi bật là ứng dụng robot phỏng sinh học (bio-inspired robot), lấy cảm hứng từ cấu trúc và cơ chế vận động của các sinh vật tự nhiên để tối ưu hóa khả năng khoan trong môi trường đất phức tạp. Trong số đó, robot khoan ngầm do KAIST (Viện Khoa học và Công nghệ Tiên tiến Hàn Quốc) phát triển là một bước đột phá đáng chú ý.
Robot khoan ngầm của KAIST được thiết kế dựa trên nguyên lý phỏng sinh học, lấy cảm hứng từ các sinh vật có khả năng đào đất hiệu quả như giun đất, động vật đào hang hoặc các loài có cấu trúc xương đặc biệt. Điểm nổi bật của robot này là cấu trúc “ống xương mập mạp” (thick tubular skeleton), cho phép phân bổ lực đều trong quá trình khoan và giảm thiểu ma sát với môi trường xung quanh. Cấu trúc này không chỉ giúp robot di chuyển linh hoạt mà còn tăng khả năng chịu lực và ổn định trong các điều kiện địa chất khác nhau.
Khác với các máy khoan HDD truyền thống sử dụng lực xoay và đẩy từ bên ngoài, robot khoan phỏng sinh học hoạt động theo cơ chế “tiến từng đoạn” (incremental propulsion). Robot sử dụng các phần thân co giãn hoặc chuyển động theo chu kỳ để tạo lực tiến về phía trước, tương tự như cách giun đất di chuyển trong lòng đất. Cơ chế này giúp giảm áp lực lên thành lỗ khoan, hạn chế sụt lún và đặc biệt hiệu quả trong các môi trường đất mềm hoặc không ổn định.
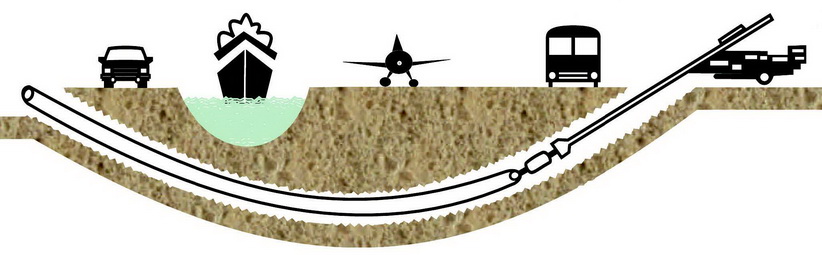
Trong ứng dụng thực tế, robot khoan ngầm của KAIST được thiết kế để xuyên qua các tuyến đường giao thông mà không cần đào mở bề mặt. Điều này đặc biệt hữu ích trong đô thị, nơi việc cắt đường gây ảnh hưởng lớn đến giao thông và đời sống người dân. Robot có thể được đưa vào lòng đất từ một hố nhỏ, sau đó di chuyển theo tuyến thiết kế dưới lòng đường, tạo lỗ khoan để lắp đặt các đường ống hoặc cáp ngầm.
Một trong những ưu điểm lớn của robot phỏng sinh học là khả năng thích nghi với điều kiện địa chất phức tạp. Nhờ cấu trúc linh hoạt và cơ chế vận động đặc biệt, robot có thể di chuyển qua các lớp đất khác nhau mà không cần thay đổi thiết bị. Điều này giúp giảm chi phí và thời gian thi công, đồng thời giảm rủi ro khi gặp các lớp đất không đồng nhất.
Ngoài ra, robot còn được trang bị hệ thống cảm biến và điều khiển thông minh, cho phép theo dõi vị trí, áp lực và điều kiện môi trường trong thời gian thực. Dữ liệu từ các cảm biến được truyền về trung tâm điều khiển, nơi người vận hành có thể điều chỉnh hướng và tốc độ khoan. Trong tương lai, với sự phát triển của trí tuệ nhân tạo, các robot này có thể hoạt động tự động hoàn toàn, tự điều chỉnh để tối ưu hóa quá trình khoan.
Quy trình thi công khoan ngầm bằng robot phỏng sinh học bắt đầu từ công tác khảo sát và thiết kế tuyến. Mặc dù robot có khả năng thích nghi cao, nhưng việc hiểu rõ điều kiện địa chất vẫn rất quan trọng để tối ưu hóa hiệu quả. Tuyến khoan được thiết kế với các thông số về độ sâu, hướng và bán kính cong phù hợp với khả năng của robot.
Sau khi chuẩn bị, robot được đưa vào lòng đất thông qua một hố khởi đầu nhỏ. Từ đó, robot bắt đầu quá trình khoan bằng cách sử dụng cơ chế co giãn và xoay để tiến về phía trước. Trong quá trình này, robot có thể đồng thời tạo lỗ và gia cố thành lỗ bằng cách nén đất xung quanh hoặc sử dụng vật liệu hỗ trợ.
Một điểm khác biệt so với HDD là robot không cần sử dụng dung dịch khoan với khối lượng lớn. Thay vào đó, robot có thể sử dụng các cơ chế cơ học để ổn định lỗ khoan, giúp giảm thiểu ô nhiễm môi trường và đơn giản hóa hệ thống thi công.
Sau khi hoàn thành lỗ khoan, đường ống hoặc cáp có thể được kéo hoặc lắp đặt trực tiếp thông qua robot hoặc bằng các thiết bị hỗ trợ. Do lỗ khoan được tạo ra với độ chính xác cao và ít biến dạng, quá trình lắp đặt thường diễn ra thuận lợi.
Trong thực tế, công nghệ robot khoan phỏng sinh học vẫn đang trong giai đoạn phát triển và thử nghiệm, nhưng đã cho thấy tiềm năng lớn trong các ứng dụng như thi công đô thị, khoan qua đường, khoan trong khu vực nhạy cảm và các môi trường khó tiếp cận. So với HDD truyền thống, công nghệ này có thể mang lại lợi ích về giảm tiếng ồn, giảm rung động và tăng độ an toàn.
Tuy nhiên, cũng cần lưu ý rằng công nghệ này vẫn còn một số hạn chế như công suất khoan chưa lớn, tốc độ thi công còn chậm và chi phí nghiên cứu phát triển cao. Do đó, trong thời gian tới, việc kết hợp giữa công nghệ HDD truyền thống và robot phỏng sinh học có thể là hướng đi hiệu quả, tận dụng ưu điểm của cả hai phương pháp.
Về lâu dài, sự phát triển của robot khoan ngầm phỏng sinh học sẽ mở ra một hướng đi mới cho ngành xây dựng hạ tầng. Với khả năng thi công chính xác, linh hoạt và thân thiện với môi trường, công nghệ này có thể trở thành tiêu chuẩn trong các dự án đô thị thông minh và phát triển bền vững.
Tóm lại, robot khoan ngầm phỏng sinh học do KAIST phát triển là một bước tiến quan trọng trong công nghệ thi công không rãnh. Với thiết kế độc đáo và khả năng vận hành linh hoạt, robot này không chỉ giải quyết các vấn đề hiện tại của HDD mà còn mở ra nhiều cơ hội mới cho ngành xây dựng. Trong tương lai, khi công nghệ được hoàn thiện và thương mại hóa, robot khoan ngầm sẽ trở thành một công cụ không thể thiếu trong việc xây dựng hệ thống hạ tầng hiện đại.
Có thể bạn muốn biết:
Dịch vụ khoan ngầm thi công đường ống dẫn khí
Dịch vụ khoan ngầm qua đường uy tín, công nghệ cao
Dịch vụ khoan ngầm bằng robot kéo ống ngầm qua đường
CÔNG TY CP TƯ VẤN ĐẦU TƯ VÀ THIẾT KẾ XÂY DỰNG MINH PHƯƠNG
Địa chỉ: 28B Mai Thị Lựu - Khu phố 7, Phường Tân Định, TP.HCM
Hotline: 0903 649 782 - 028 3514 6426
Email: nguyenthanhmp156@gmail.com
Website: www.minhphuongcorp.com - www.minhphuongcorp.net



Tin liên quan
HOTLINE

HOTLINE
0903 649 782




HOTLINE
HOTLINE
0903 649 782





