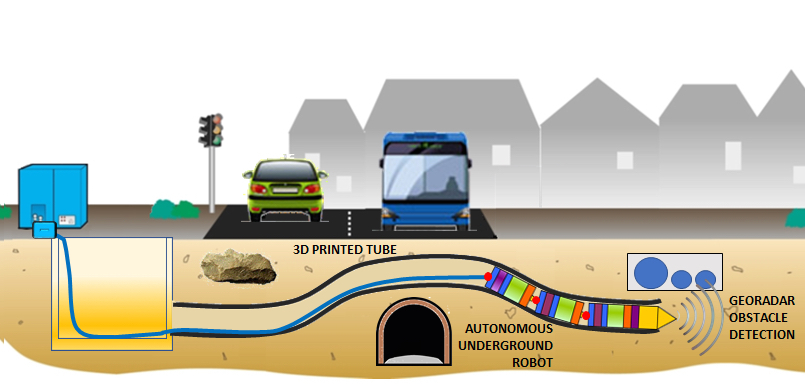
Một robot khoan tự đẩy trong chiến lược ngầm hóa
Phát minh robot khoan tự đẩy thuộc về lĩnh vực công nghệ robot, liên quan đến một robot khoan tự đẩy có thể được sử dụng để tìm kiếm các mỏ dưới lòng đất, thăm dò địa chất và địa chấn, cứu hộ mỏ, v.v.
Ngày đăng: 09-07-2021
1,522 lượt xem
Một robot khoan tự đẩy trong chiến lược ngầm hóa
Lĩnh vực công nghệ
Phát minh robot khoan tự đẩy thuộc về lĩnh vực công nghệ robot, liên quan đến một robot khoan tự đẩy có thể được sử dụng để tìm kiếm các mỏ dưới lòng đất, thăm dò địa chất và địa chấn, cứu hộ mỏ, v.v.
Công nghệ nền
Việt Nam là một trong số ít các quốc gia tài nguyên khoáng sản lớn trên thế giới, nhưng hầu hết các tài nguyên khoáng sản được lưu trữ dưới lòng đất hoặc dưới đáy biển, rất khó để phát hiện trực tiếp các địa điểm lưu trữ để khai thác; Các môi trường như ngầm, đáy biển hoặc tàn tích của các tòa nhà không thể tiếp cận trực tiếp hoặc không cho phép mọi người truy cập trực tiếp, và các thiết bị khai quật lớn được xây dựng trên mặt đất, thường có những nhược điểm như tốn thời gian, tiêu thụ năng lượng cao, chi phí cao và điều kiện môi trường mặt đất hạn chế.
Là một đại diện điển hình của công nghệ thông tin và công nghệ sản xuất tiên tiến, robot đã trở thành một lĩnh vực công nghệ cạnh tranh trên toàn thế giới, và robot khoan ngầm đã trở thành một điểm nóng trong nghiên cứu trong và ngoài nước trong những năm gần đây. Trước đây, trong nước đã phát triển robot hoạt động đặc biệt "xuyên địa long" cho ống lát ngầm và robot bùn vòm để trục vớt xác tàu ngầm, các nguồn năng lượng robot như vậy thường là chất lỏng hoặc khí nén, cấu trúc được sử dụng để bóp đất về phía trước, với mức tiêu thụ năng lượng cao, hệ thống điều khiển phức tạp và các nhược điểm khác. Một trường đại học trong nước đã thiết kế một robot vòm giun đất giả trong môi trường đất, với ba phần cơ thể có thể di chuyển trục và sưng xuyên tâm, bắt chước cách leo giun đất, nhưng robot này vẫn còn trong giai đoạn nghiên cứu lý thuyết và mô phỏng ảo, khoảng cách thực tế vẫn còn một khoảng cách lớn. Nhật Bản đã phát triển một robot khoan nhỏ "Digbot" để khảo sát địa chất, được thiết kế để loại bỏ mô-men xoắn kháng đất trong quá trình khoan, với điện từ ở phía sau robot cung cấp lực đẩy về phía trước của robot, nhưng phương pháp này cung cấp lực đẩy hạn chế và không có chức năng lái. Hoa Kỳ đã phát triển một thiết bị khoan lỗ sâu tự đẩy, được chia thành hai phần trước và sau, sử dụng phương pháp chuyển động giả để tiến lên phía trước, để thăm dò hành tinh ngoài trái đất cũng có thể được sử dụng để khoan dưới lòng đất, nhưng robot có cấu trúc phức tạp, tốn kém để sản xuất và không phù hợp với các ứng dụng sản xuất hàng loạt. Mặc dù robot khoan đã được nghiên cứu trong và ngoài nước trong nhiều năm, nhiều robot khoan vẫn đang trong giai đoạn nghiên cứu trong phòng thí nghiệm do môi trường đất ngầm phức tạp và yêu cầu hiệu suất cao đối với robot.
Do đó, việc phát minh ra một robot khoan có mức tiêu thụ điện năng thấp, kích thước nhỏ và chuyển động linh hoạt có thể giúp mọi người thực hiện động đất hiệu quả, cứu hộ mỏ và thăm dò ngầm. ( Xem thêm Khoan xuyên đường bằng robot )

Nội dung phát minh
Mục đích của phát minh này là cung cấp một robot khoan tự đẩy có thể di chuyển về phía trước và chỉ đạo trong đất, để đạt được thăm dò khoáng sản, thăm dò địa chất và địa chấn, cứu hộ khó khăn. Đường kính khoan chung là 100 ~ 600mm, chiều dài khoan là 20 ~ 100m.
Để đạt được mục tiêu trên, chương trình kỹ thuật được sử dụng trong sáng chế hiện nay là: một máy khoan tự đẩy di chuyển trong đất, chủ yếu bao gồm bốn phần: đầu, cơ thể robot, thanh xoắn ốc và chân hỗ trợ, bao gồm hệ thống khoan để cắt và vận chuyển đất, cung cấp khả năng chuyển động, hệ thống điều khiển để kiểm soát hệ thống khoan và hệ thống điện.
Hệ thống khoan bao gồm: mũi khoan hình nón, động cơ và thanh xoắn ốc, động cơ có trục đầu ra kép, kết nối đầu khoan hình nón và thanh xoắn ốc tương ứng thông qua các chân kết nối. Bên ngoài động cơ có nan hoa, được kết nối bằng bu lông với vách ngăn phía trước cơ thể robot. Thanh xoắn ốc được cố định trên trục trung tâm của cơ thể robot thông qua một cặp vòng bi treo, và vòng bi được cố định trên nền tảng vỏ bên trong của robot thông qua khớp bu lông.
Hệ thống điện bao gồm cơ thể robot, bàn chân hỗ trợ và thanh trượt được kết nối với nhau thông qua cơ chế kính thiên văn. Cơ thể con người của máy được hàn lại với nhau bởi vỏ bên trong, vỏ thông qua vách ngăn phía trước và phía sau, bezel phía trước có lỗ ren, vách ngăn phía sau có lỗ thông qua. Có một nền tảng ở cả hai đầu của vỏ bên trong, nền tảng có lỗ ren, và các hướng dẫn được đặt xung quanh bên ngoài của vỏ bên trong. Các rãnh được phủ xung quanh thanh trượt, phù hợp với đường ray trên vỏ bên trong, với các lỗ ren ở cuối thanh trượt.
Hệ thống điều khiển bao gồm: thiết bị phát hiện, con quay hồi chuyển và bảng điều khiển, thiết bị phát hiện được lắp đặt ở bên trong của bezel phía trước cơ thể robot, con quay hồi chuyển và bảng điều khiển được lắp đặt ở bên trong của bezel phía sau cơ thể robot.
Mũi khoan hình nón sử dụng thiết kế đặc biệt rỗng, để các mảnh vụn cắt có thể đi vào bên trong mũi khoan, tốt nhất, giữa mũi khoan hình nón và cơ thể robot có thể thêm cơ chế nghiền, hạn chế đường kính hạt đất, ngăn chặn "kẹt" đất thanh xoắn ốc.
Bàn chân hỗ trợ được điều khiển bởi cơ chế kính thiên văn xuyên tâm và cơ chế mở rộng trục. Cơ chế kính thiên văn xuyên tâm bao gồm động cơ xuyên tâm, thanh lụa xuyên tâm và chân hỗ trợ, động cơ xuyên tâm và thanh lụa xuyên tâm được kết nối bằng chân, động cơ xuyên tâm được gắn vào thanh trượt bằng ốc vít, thanh lụa xuyên tâm được kết nối thông qua tay áo trục và thanh trượt, hỗ trợ chân và dây xuyên tâm Thanh được kết nối thông qua các lỗ ren, cả hai tạo thành cơ chế đai ốc vít, cơ chế kính thiên văn trục bao gồm động cơ trục, thanh lụa trục và thanh trượt, động cơ trục và thanh lụa trục được kết nối với nhau bằng chân, động cơ trục được cố định vào vỏ máy bằng ốc vít. Thanh trượt được kết nối với thanh lụa trục thông qua các lỗ ren, cả hai tạo thành cơ chế đai ốc vít.
Cơ thể cơ thể robot được bao quanh bởi ba cửa sổ, tạo điều trị chuyển động trục và xuyên tâm hỗ trợ bàn chân.
Có một vết sưng ở cả hai đầu của bàn chân hỗ trợ, tạo điều kiện cho nó được nhúng trong đất xung quanh các bức tường lỗ, cung cấp đủ lực phản ứng hỗ trợ cho robot. Ngoài ra, một lá chắn bụi đàn hồi được bao quanh bởi bàn chân hỗ trợ.
Đuôi robot được kéo với cáp kết hợp, cáp kết hợp xung quanh cuộn bên trong robot, cuộn được hàn vào vỏ bên trong của máy. Tốt nhất, cáp kết hợp bao gồm dây nguồn, dây tín hiệu và dây dẫn. Cáp kết hợp được kết nối với nguồn điện DC và trung tâm điều khiển máy tính trên mặt đất thông qua các lỗ thông qua bezel phía sau để đạt được khoan liên tục của robot và điều khiển thời gian thực tầm xa của chuyển động robot.
So với các công nghệ hiện có, ưu điểm của sáng chế hiện tại là:
1, robot có mũi khoan và thiết bị thoát nước, khoan và thoát nước cùng một lúc, khoan hiệu quả cao, và sử dụng lực phản tác dụng hỗ trợ chân để hỗ trợ các bức tường lỗ để thúc đẩy chuyển động robot, có thể khoan trơn tru dưới lòng đất và có thể di chuyển tự do và lái trong đất.
2, thông qua việc tích hợp các cơ chế kính thiên văn xuyên tâm và trục, khéo léo nhận ra chuyển động hỗ trợ chân theo cả hai hướng, cấu trúc nhỏ gọn, giảm số lượng thiết bị truyền động.
3, có thể được trang bị các mô-đun chức năng mở rộng, chẳng hạn như ống kính CCD, thiết bị phát hiện khoáng sản và thiết bị phát hiện sự sống, để đạt được thăm dò môi trường ngầm, khám phá các mỏ khoáng sản và tìm kiếm sự sống.
4, được xây dựng trong thu thập, đặt cáp kết hợp của thiết bị cuộn, loại bỏ sức đề kháng ma sát gây ra bởi kéo và kéo cáp, để ngăn chặn robot bị mắc kẹt.
5. Cơ chế tổng thể của robot rất đơn giản, chi phí thực hiện thấp, áp dụng cho các nhiệm vụ như thăm dò mỏ ngầm, thăm dò địa chất và động đất, cứu hộ và cứu hộ mỏ.
Các dấu hiệu khác nhau trong hình là: 1, mũi khoan hình nón, 2, động cơ, 3, thiết bị phát hiện, 4, cơ thể robot, 5, vòng bi treo, 6, chống bụi đàn hồi, 7, động cơ trục, 8, hỗ trợ chân; 9, thanh lụa trục; 10, thanh tơ xuyên tâm; 12, thanh xoắn ốc; 13, cuộn; 14, cáp kết hợp; 15, trung tâm điều khiển máy tính trên mặt đất; 16, đường tín hiệu; 17, nguồn điện DC; 18, dây nguồn; 19, dây dẫn; 20, bảng điều khiển; 21, con quay hồi chuyển; 22 , thanh trượt; 23, tay áo trục; 24, vỏ bên trong; 25, tấm nan hoa; 26, răng cắt; 27, nền tảng; 28, cơ thể nhà ở; 29, đường ray; 30, lỗ thông qua; 31, bezel phía sau; 32, lỗ ren; 33, cửa sổ; 34, bezel phía trước; 35, lỗ ren; 36, rãnh; 37, lỗ ren; 38, lồi; 39, lỗ ren.
Cách thực hiện cụ thể
Hiện thân của robot khoan tự đẩy, chủ yếu bao gồm đầu 1, cơ thể robot 4, thanh xoắn ốc 12, hỗ trợ chân 8 bốn phần, bao gồm cả việc thực hiện cắt đất và hệ thống khoan để cung cấp khả năng chuyển động, hệ thống điều khiển điều khiển hệ thống khoan và hệ thống điện.
Hệ thống khoan bao gồm mũi khoan hình nón 1, động cơ 2 và thanh xoắn ốc 12 ba phần. Đầu khoan 1 là đầu khoan xoắn ốc, phía sau ở dạng rỗng, bề mặt mũi khoan được trang bị răng cắt 26, thuận tiện cho việc cắt đất, trong khi cấu trúc rỗng tạo điều kiện cho chip đất có thể đi vào thanh xoắn ốc thoát nước 12, và cuối cùng thoát ra khỏi đuôi thân máy bay. Động cơ 2 có trục đầu ra kép, thông qua các chân kết nối kết nối đầu khoan hình nón 1 và thanh xoắn ốc 12, động cơ 2 với nan hoa 25, nan hoa 25 thông qua bu lông và cơ thể robot 4 vách ngăn phía trước 34 kết nối. Động cơ 2 và thanh xoắn ốc 12 có thể thêm bộ giảm tốc (không được vẽ trong hình) để tăng công suất truyền tải của thanh xoắn ốc 12. Cơ chế nghiền có thể được thêm vào giữa mũi khoan 1 và cơ thể robot 4 (đơn giản, không được vẽ trong hình), hạn chế đường kính hạt đất và ngăn chặn thanh xoắn ốc 12 "bị mắc kẹt". Thanh xoắn ốc 12 được sử dụng để thoát nước được cố định trên trục trung tâm của cơ thể robot 4 thông qua một cặp vòng bi nâng 5 và vòng bi nâng 5 được cố định bằng cách kết nối bu lông vào nền tảng 24 của vỏ bên trong robot 24. Bởi vì robot sử dụng phương pháp thoát nước xoắn ốc, theo tính chất đất của môi trường làm việc, bằng cách tối ưu hóa các thông số như sân xoắn ốc, độ nghiêng xoắn ốc, đường kính ngoài, đường kính thanh lõi và tốc độ, hiệu quả thoát nước có thể được cải thiện.
Hệ thống điện bao gồm: cơ thể robot 4, hỗ trợ chân 8 và thanh trượt 22 ba phần, giữa chúng được kết nối thông qua cơ chế mở rộng. Cơ thể robot 4 bởi vỏ bên trong 24, vỏ 28 thông qua phía trước, phía sau bezel 34, 31 hàn với nhau, bezel phía trước 34 có lỗ ren 35, được sử dụng để bu lông động cơ cố định 2, bezel phía sau 31 có lỗ thông qua 30; Vỏ bên trong 24 có nền tảng 27 ở cả hai đầu, nền tảng 27 có lỗ ren 32, vỏ bên trong 24 chu vi bên ngoài được trang bị ba đường ray 29; Để đạt được trượt tương đối, thanh trượt 22 kết thúc với lỗ ren 37.
Các hỗ trợ trên 8 được điều khiển bởi cơ chế kính thiên văn xuyên tâm và cơ chế mở rộng trục. Cơ chế kính thiên văn xuyên tâm bao gồm động cơ xuyên tâm 11 và thanh lụa xuyên tâm 10, cả hai đều được kết nối bằng chân, động cơ 11 được gắn vào thanh trượt 22 bằng ốc vít, thanh lụa 10 được kết nối thông qua tay áo trục 23 và thanh trượt 22, trong khi hỗ trợ 39 lỗ ren ở giữa chân và cơ chế đai ốc vít với thanh lụa 10 tạo thành cơ chế chuyển động dọc theo động cơ 111. Cơ chế kính thiên văn trục bao gồm động cơ trục 7 và thanh dây trục 9, cả hai đều được kết nối bằng chân và động cơ 7 được gắn vào vỏ bên trong máy 24 bằng ốc vít. Thanh trượt 22 kết thúc được trang bị ba lỗ thông qua chủ đề 37 và thanh lụa 9 tạo thành cơ chế đai ốc vít, trong khi thanh trượt 22 thông qua rãnh 36 có thể trượt dọc theo đường ray 29 trên vỏ bên trong 24, dưới động cơ 7 ổ đĩa, hỗ trợ 8 dưới thanh trượt 22 lái xe có thể dọc theo thanh lụa 9 để di chuyển qua lại. Thông qua sự kết hợp của các cơ chế kính thiên văn xuyên tâm và các cơ chế mở rộng trục, chuyển động và tay lái của robot có thể đạt được.
Các hỗ trợ trên ở cả hai đầu của 8 có một lồi 38 để nhúng trong đất thành lỗ xung quanh, cung cấp đủ hỗ trợ cho robot để chống lại lực đẩy, đẩy robot về phía trước hoặc quay. Để đáp ứng các yêu cầu về kích thước cấu trúc, các cơ chế kính thiên văn xuyên tâm và cơ chế mở rộng trục ở trên có thể được thay thế bằng xi lanh kính thiên văn hoặc xi lanh thủy lực kính thiên văn.
Hệ thống điều khiển bao gồm thiết bị phát hiện 3, con quay hồi chuyển 21 và bảng mạch điều khiển 20, thiết bị phát hiện 3 được lắp đặt bên trong vách ngăn phía trước cơ thể con người 4 của máy, được sử dụng để phát hiện môi trường đất xung quanh robot; 4 Phía bên trong bezel phía sau 31, con quay hồi chuyển 21 được sử dụng để theo dõi vị trí robot và thay đổi tư thế cơ thể, điều khiển bảng mạch 20 thu thập thông tin thiết bị phát hiện 3 và con quay hồi chuyển 21, cung cấp phản hồi thông tin môi trường xung quanh robot cho trung tâm điều khiển máy tính trên mặt đất 15 Và vị trí riêng của họ, phản hồi thông tin tư thế, nhân viên trên mặt đất thông qua trung tâm điều khiển máy tính 15 để thực hiện giám sát thời gian thực từ xa của robot.
Ngoài ra, cơ thể robot 4 được bao quanh bởi một lá chắn bụi đàn hồi 6 để ngăn chặn đất hoặc nước xâm nhập vào bên trong robot. Đồng thời, robot được xây dựng trong cáp kết hợp 14 cuộn 13, cuộn 13 được hàn vào vỏ bên trong robot 24. Cáp kết hợp 14 được kết nối với các thiết bị trên mặt đất thông qua cơ thể robot 4 bezel phía sau 31 lỗ thông qua 30. Cáp kết hợp 14 chứa dây nguồn 18, dòng thư 16 và dây dẫn 19. Dây nguồn 18 kết nối bảng mạch điều khiển robot 20 và nguồn điện DC mặt đất 17, đường tín hiệu 16 kết nối bảng mạch điều khiển robot 20 và trung tâm điều khiển máy tính trên mặt đất 15, để đạt được khoan liên tục của robot và điều khiển thời gian thực từ xa cho chuyển động của robot. Dây dẫn 19 được sử dụng để ngăn chặn dây nguồn 17 và đường tín hiệu 16 chịu lực kéo quá mức và phá vỡ.
Nguyên tắc hoạt động: Máy khoan robot khoan tự động đẩy của sáng chế hiện tại, cơ chế thoát nước được điều khiển bởi động cơ 2 với trục đầu ra kép, Mũi khoan hình nón 1 cắt đất, các mảnh vụn dưới cắt đi vào thanh xoắn ốc 12 thông qua phần rỗng của mũi khoan, sau đó thoát ra khỏi cơ thể bởi thanh xoắn ốc 12; Sự tiến bộ và tay lái của robot có thể đạt được. Trong quá trình khoan robot, cơ thể robot 4 bên trong thân robot được trang bị 3 để phát hiện môi trường xung quanh, con quay hồi chuyển 21 được sử dụng để theo dõi vị trí robot và thay đổi tư thế cơ thể, và thông tin này thông qua cáp kết hợp đuôi 14 đến trung tâm điều khiển máy tính trên mặt đất 15, cho phép người dân trên mặt đất để theo dõi động lực mới nhất của robot. Khi thiết bị phát hiện 3 phát hiện các vật thể lạ như đá, lỗ và các vật thể lạ khác ở phía trước, nhân viên truyền hướng dẫn qua cáp kết hợp 14 đến bảng mạch 20, điều khiển robot né tránh chướng ngại vật theo thông tin vị trí được cung cấp bởi con quay hồi chuyển 21;
Các bước chuyển động cơ bản của robot khoan tự đẩy của sáng chế hiện tại được mô tả dưới đây.
Một chu kỳ chuyển động chuyển tiếp có thể được chia thành 6 bước.
Bước 1, robot ở trạng thái ban đầu, hỗ trợ chân 8 co lại trong cơ thể robot 4. Động cơ 2 lái xe mũi khoan hình nón 1 và thanh xoắn ốc 12 quay, robot cắt đất thành các lỗ, mặt khác thông qua thanh xoắn ốc 12 để loại bỏ bụi bẩn ra khỏi đuôi.
Bước 2, động cơ 11 lái xe thanh 10, cho phép 3 hỗ trợ 8 đồng thời nhô ra từ bên trong cơ thể robot 4 dọc theo xuyên tâm, và chống lại các bức tường lỗ, cung cấp đủ lực phản tác dụng hỗ trợ.
Bước 3, động cơ 7 lái xe thanh lụa 9, bởi vì hỗ trợ chân 8 chống lại các bức tường lỗ, không thể di chuyển theo trục, do đó, thanh 9 dọc theo trục kéo dài, lái xe động cơ 7 trục di chuyển, trong khi động cơ 7 cố định vào vỏ bên trong 24, do đó lái xe cơ thể về phía trước khoảng cách h.
Bước 4, động cơ 11 lái xe thanh 10, cho phép 3 hỗ trợ 8 đồng thời co lại dọc theo cơ thể robot 4.
Bước 5, động cơ 7 lái xe thanh lụa 9, bởi vì ma sát giữa cơ thể robot và bức tường lỗ lớn hơn ma sát trượt của khối trượt 22 dọc theo vỏ bên trong 24, thanh lụa 9 lái xe thanh trượt 22 dọc theo trục khoảng cách h. Robot trở lại trạng thái ban đầu, tức là trở lại bước 1.
Tại thời điểm này, hoàn thành một chu kỳ chuyển động, robot tổng thể di chuyển về phía trước một khoảng cách h, vì vậy lặp đi lặp lại, có thể đạt được một đường thẳng liên tục của máy.
Nguyên tắc chuyển động tay lái robot, khi hỗ trợ bàn chân hỗ trợ 8 nhô ra và chống lại các bức tường lỗ, phần còn lại hỗ trợ chân không di chuyển, trong khi động cơ 7 lái xe thanh lụa 9 chuyển động, do lực phản ứng đất trên một chân hỗ trợ duy nhất làm cho toàn bộ cơ thể robot bị mất cân bằng mô-men xoắn, thân máy bay có thể bị lệch tương ứng, do đó có thể đạt được tay lái.
Các mô tả trên của hiện thân là để tạo điều kiện cho các kỹ thuật viên bình thường trong lĩnh vực kỹ thuật này để hiểu và áp dụng sáng chế hiện tại. Những người quen thuộc với công nghệ trong lĩnh vực này rõ ràng có thể dễ dàng thực hiện những thay đổi đối với các hiện thân này và sử dụng các nguyên tắc chung được mô tả ở đây trong các hiện thân khác mà không cần lao động sáng tạo. Do đó, phát minh hiện tại không giới hạn ở đây, các kỹ thuật viên trong lĩnh vực này theo tiết lộ của sáng chế hiện tại, những cải tiến và sửa đổi được thực hiện cho sáng chế hiện tại nên nằm trong phạm vi bảo vệ của sáng chế hiện tại.
Xem thêm Cách dùng dung dịch khoan sử dụng cho công trình ngầm
CÔNG TY CP TƯ VẤN ĐẦU TƯ VÀ THIẾT KẾ XÂY DỰNG MINH PHƯƠNG
Địa chỉ: 28B Mai Thị Lựu - Khu phố 7, Phường Tân Định, TP.HCM
Hotline: 0903 649 782 - 028 3514 6426
Email: nguyenthanhmp156@gmail.com
Website: www.minhphuongcorp.com - www.minhphuongcorp.net



Tin liên quan
- › Khoan ngầm kéo ống HDD: quy tắc kỹ thuật và lời khuyên của chuyên gia
- › Hướng dẫn vận hành máy khoan định hướng ngang HDD, công ty CP TV ĐT &TK XD Minh Phương
- › Sữ dụng công nghệ khoan ngầm kéo ống bằng các phương pháp khoan khác nhau
- › Chức năng định hướng trong khoan ngầm robot
- › Phương án thi công khoan ngầm định hướng robot HDD
HOTLINE

HOTLINE
0903 649 782




HOTLINE
HOTLINE
0903 649 782





