Một robot khoan ngầm nhỏ, tự trị, hoạt động dưới lòng đất dành cho môi trường đô thị
Các mục đích sử dụng có thể có đối với khoan ngầm robot bao gồm xây dựng các đường ống dẫn, điều tra bề mặt dưới bề mặt và thậm chí cung cấp hỗ trợ...
Ngày đăng: 28-12-2020
1,646 lượt xem
Một robot khoan ngầm nhỏ, tự trị, hoạt động dưới lòng đất dành cho môi trường đô thị
Dự án châu Âu này, do Phòng thí nghiệm Robot của Đại học Carlos III of Madrid điều phối, quy tụ bảy đối tác từ năm quốc gia khác nhau với mục đích thiết kế và phát triển một hệ thống khoan robot tự động có khả năng khai quật, điều động và lập bản đồ bề mặt. Các mục đích sử dụng có thể có đối với khoan ngầm robot bao gồm xây dựng các đường ống dẫn, điều tra bề mặt dưới bề mặt và thậm chí cung cấp hỗ trợ cho các nhóm tìm kiếm và khôi phục.

Dự án BADGER là một phần của chương trình khoan ngầm HDD 2020 và tạo thành một nỗ lực nhằm giải quyết tình trạng phổ biến ở nhiều thành phố, tức là nhu cầu khoan ngầm với tác động bên ngoài tối thiểu. Công nghệ khoan ngầm robot được đề cập sẽ có thể khoan các mạng đường hầm có đường kính nhỏ - cho cáp quang, điện, nước, v.v.. mà không phải trả chi phí và phức tạp liên quan đến việc đào hào hoặc phải đào và bố trí lại các công trình hiện có. Theo các nhà nghiên cứu, phương pháp khoan ngầm robot làm việc này hiện chỉ được sử dụng trong 5% các dự án xây dựng đô thị, và việc thực hiện nó trên cơ sở tổng quát hơn sẽ giúp tiết kiệm xã hội đáng kể cả về chi phí và giảm thiểu bất tiện.
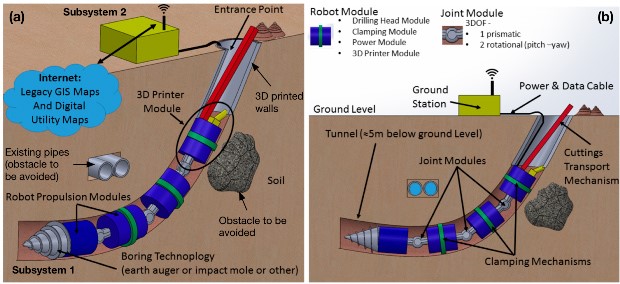
Carlos Balaguer, giáo sư Kỹ thuật hệ thống và Tự động hóa đồng thời là điều phối viên của dự án, trình bày ý tưởng, một cách không chính thức, là “một robot khoan ngầm trông hơi giống một con rắn và có khả năng tự đục lỗ dưới bề mặt bằng cách sử dụng cảm biến và bản đồ”. Theo các bản phác thảo và nguyên mẫu, trên thực tế, nó trông giống như một “con rắn cơ học lớn”, dài gần 80 cm và đường kính 20 cm và bao gồm một số mô-đun liên kết với nhau: đầu khoan, cơ cấu đẩy, hệ thống dẫn hướng và hệ thống xây tường đỡ. Tên của nó là BADGER, hoặc khoan robot cho các tùy chọn cài đặt, lập bản đồ và điều hướng không rãnh của Autonomous unDerGround.
Sự kết hợp tài tình của các công nghệ khoan ngang định hướng đặt đường ống ngầm
Điều thú vị nhất về loại dự án này thường là các loại công nghệ được kết hợp với nhau, một số có thể là tiên tiến và một số có thể đã tồn tại, và những cách khéo léo này được kết hợp với nhau. Trong trường hợp BADGER ( roBot for Autonomous nDerGround trenchless opERations):
Ý tưởng là một robot khoan hoạt động dưới lòng đất và di chuyển độc lập, một môi trường mà lĩnh vực robot không quen thuộc lắm, đã được sử dụng nhiều hơn trong các dự án liên quan đến môi trường bề mặt, không khí hoặc môi trường nước. Vì vậy, điều này thực sự tạo thành lãnh thổ chưa được khám phá cho người máy.
Để điều hướng tự động, máy khoan robot sử dụng công nghệ georadar và bản đồ kỹ thuật số để cho nó biết vị trí cần khoan. Nó cũng được trang bị các cảm biến để cố gắng tránh các vấn đề không lường trước được như đá hoặc các công trình ngầm hiện có. Robot cũng sử dụng Radar xuyên đất (GPR) và một số đơn vị đo lường quán tính (IMU) để tính toán vị trí của nó đối với môi trường xung quanh và vị trí vật lý của nó trong 3D.
Việc xây dựng đường hầm thích hợp đòi hỏi phải gia cố các bức tường nơi tiến hành khoan ngầm và ý tưởng trong trường hợp này là sử dụng máy in 3D trong một trong các mô-đun để «in các bức tường đỡ» khi khoan robot tiến bộ. Các máy in 3D này sử dụng các vật liệu như bê tông và đã được sử dụng thành công trong nhiều dự án cho đến nay.
Kỹ thuật khoan ngầm HDD rất đa dạng và có thể thay thế cho nhau. Thiết kế mô-đun của robot khoan ngầm có nghĩa là các đầu khoan có thể thay đổi, tùy thuộc vào loại địa hình, vì vậy thiết bị có thể sử dụng khoan quay hoặc khoan va đập. Thậm chí còn có một công cụ được phát triển đặc biệt cho dự án sử dụng sóng siêu âm để nghiền đá và các mảnh vụn khác.
Dịch vụ khoan ngầm robot BADGER được hình thành với ý tưởng giảm thiểu tác động bên ngoài, châm ngôn duy nhất là «không đào hào». Đây được gọi là công nghệ không có rãnh, ý tưởng cơ bản là để tránh tiếng ồn, khói bụi và gián đoạn giao thông và chuyển hướng, tất cả đều có thể gây ra vấn đề, thậm chí nguy hiểm cho công chúng.

Cách khoan ngang dẫn hướng bằng robot BADGER hoạt động
Có thể thấy từ các thiết kế sơ bộ, robot khoan ngầm bao gồm một số mô-đun được kết hợp bằng các khớp nối cơ khí giúp nó linh hoạt và cơ động; một hệ thống cơ điện tử cho phép đầu khoan di chuyển và quay theo mọi hướng và mọi góc độ với khả năng cơ động tối đa, có nghĩa là robot có thể quay và điều khiển theo các góc mở và đóng theo yêu cầu. Một khía cạnh quan trọng khác là nó có thể hoạt động với độ dốc nghiêm trọng. Độ sâu điển hình mà thiết bị có thể đạt được là khoảng 5 mét dưới bề mặt.
Mặc dù khoan robot tự động, nó luôn được vận hành thông qua một trạm điều khiển, một máy tính thực hiện tất cả các nhiệm vụ giám sát và lập kế hoạch ngoài việc tạo ra một biểu diễn kỹ thuật số của môi trường xung quanh và bất kỳ vật thể dễ nhận biết nào mà nó gặp trên đường đi. Điều này đạt được thông qua việc sử dụng các bản đồ kỹ thuật số có sẵn về cả địa hình và hệ thống điện, nước, khí đốt và nước thải trong khu vực được đề cập. Robot khoan qua đường cũng sử dụng một hệ thống radar thông thường để lập bản đồ dưới bề mặt trước khi bắt đầu khoan.
Thiết bị được kết nối với bên ngoài thông qua một sợi cáp dài được sử dụng để cung cấp cho hệ thống cả nguồn điện và truyền dữ liệu (trạm trung tâm cũng có tính năng kết nối không dây). Vật liệu được đào và nghiền thành bột được chiết xuất thông qua một ống dẫn được trang bị hệ thống bơm thông thường. Cả dây cáp và ống dẫn khai thác đều đủ dài để đi theo robot khoan đến bất cứ nơi đâu.

Vượt ra ngoài những đường hầm nhỏ
Dự án khoan ngầm robot BADGER cuối cùng có thể trở thành một giải pháp khoan ngầm kéo ống có thể chấp nhận được, nhờ vào việc giảm tác động bên ngoài và thực tế rằng nó là một cách hợp lý rẻ tiền để đào các đường hầm và ống dẫn nhỏ. Nhưng nó là nhiều hơn thế. Trong số các khía cạnh khác, từ vài tháng nay, dự án đã trở thành điểm hẹn nơi các kỹ sư và nhà khoa học từ nhiều lĩnh vực khác nhau có thể cùng nhau thực hiện một dự án chung. Những người này bao gồm các chuyên gia về robot, công nghệ thông tin, georadar, khoan và kỹ thuật dân dụng, và thậm chí cả trí tuệ nhân tạo.
Thời gian tiếp tục trôi qua, và trong khi các mục tiêu đầy tham vọng của dự án khoan ngang định hướng đang dần được đáp ứng - những mục tiêu này bắt đầu từ thiết kế và nguyên mẫu ban đầu - vẫn còn nhiều thách thức phải đáp ứng trước khi dự án có thể đạt đến đỉnh cao trong một robot khoan ngầm tự động, mô-đun, có thể cấu hình lại, linh hoạt và linh hoạt. .
Như một phần thưởng bổ sung, và một phần không nằm ngoài lĩnh vực kỹ thuật dân dụng, những người chịu trách nhiệm cho dự án đã chỉ ra rằng robot khoan ngầm HDD cũng có thể hữu ích trong việc hợp tác trong các hoạt động tìm kiếm và cứu hộ. Ví dụ trong trường hợp sạt lở đất hoặc khi có nhu cầu tiếp cận, khám phá hoặc lập bản đồ các địa điểm mà nhân viên không thể tiếp cận được, nhưng có thể không phải đối với một robot ngầm thông minh, nhỏ bé.
Có thể bạn muốn biết:
Giới thiệu kỹ thuật khoan băng qua đường
Công nghệ cải tiến quy trình dịch vụ khoan ngầm robot dẫn hướng
Khoan ngầm robot kéo ống cáp quang vượt sông, vượt qua đường
CÔNG TY CP TƯ VẤN ĐẦU TƯ VÀ THIẾT KẾ XÂY DỰNG MINH PHƯƠNG
Địa chỉ: 28B Mai Thị Lựu - Khu phố 7, Phường Tân Định, TP.HCM
Hotline: 0903 649 782 - 028 3514 6426
Email: nguyenthanhmp156@gmail.com
Website: www.minhphuongcorp.com - www.minhphuongcorp.net



Tin liên quan
HOTLINE

HOTLINE
0903 649 782




HOTLINE
HOTLINE
0903 649 782





