Phát triển robot khoan định hướng ngang trong công nghệ khoan ngầm kéo ống
Một nhóm nghiên cứu do Giáo sư Hyun Myung đứng đầu đã phát triển một máy khoan robot ( Horizontal Directional Drilling) lấy cảm hứng sinh học có tên là Mole-bot,..
Ngày đăng: 09-12-2020
1,545 lượt xem
Phát triển robot khoan định hướng ngang trong công nghệ khoan ngầm kéo ống

Một nhóm nghiên cứu do Giáo sư Hyun Myung đứng đầu đã phát triển một máy khoan robot ( Horizontal Directional Drilling) lấy cảm hứng sinh học có tên là Mole-bot, mô phỏng cấu trúc và hành vi sinh học của chuột chũi để thăm dò tài nguyên trên Trái đất và các hành tinh khác, đồng thời áp dụng vào kỹ thuật khoan định hướng ngang băng qua đường, qua sông để lắp đặt đường ống ngầm mà không gây ảnh hưởng tới môi trường xung quanh,... Ngoài ra, một thuật toán bản địa hóa có thể ước tính vị trí và định hướng của khoan robot trong môi trường dưới lòng đất đã được phát triển. Nền tảng được phát triển đã được xác minh thông qua các thí nghiệm trên nền đất thử nghiệm.
Kỹ thuật khoan ngầm bằng robot dẫn hướng HDD ( khoan ngầm định hướng HDD) được sử dụng trong các lĩnh vực khác nhau như thăm dò tài nguyên và xây dựng nền móng. Khoan định hướng HDD theo phương ngang có mục đích chính là để luồn các đường ống ngầm ngang qua đường, qua sông nhằm phục vụ nhu cầu ngầm hóa các tuyến điện lực viễn thông hay cấp thoát nước mà không cần phải đào đường hay cắt đường gây ảnh hưởng đến giao thông, hoặc môi trường xung quanh công trường.
Một số loại nghiên cứu về công nghệ khoan ngầm kéo ống có robot dẫn hướng HDD đã được thực hiện để cải thiện hiệu suất khoan ngầm trong nền đất có cường độ mạnh với độ sâu sâu. Tuy nhiên, trong điều kiện đó, thiết bị trở nên nặng và cồng kềnh, và đất đào được loại bỏ bằng dung dịch khoan và bùn, dẫn đến các vấn đề môi trường do dung dịch khoan gây ra. Khi các nguồn năng lượng hiện có như dầu mỏ và than đá đang bị cạn kiệt, thế giới đang chú ý đến việc khám phá các nguồn năng lượng mới và tập trung hơn nữa vào việc tìm kiếm các nguồn năng lượng mới trên Mặt Trăng và Sao Hỏa.
Để khắc phục những hạn chế của công nghệ khoan định hướng ngang đặt đường ống ngầm hiện có, thói quen đào và cấu trúc sinh học của máy khoan ngầm định hướng HDD tự nhiên được mô phỏng để đào và loại bỏ mảnh vỡ hiệu quả. Nhóm nghiên cứu do Giáo sư Hyun Myung đứng đầu đang phát triển một máy khoan robot đào ngầm dưới lòng đất mới lấy cảm hứng từ sinh học có tên là Mole-bot, mô phỏng cấu trúc, và giải phẫu của quá trình khoan ngầm định hướng ngang HDD.
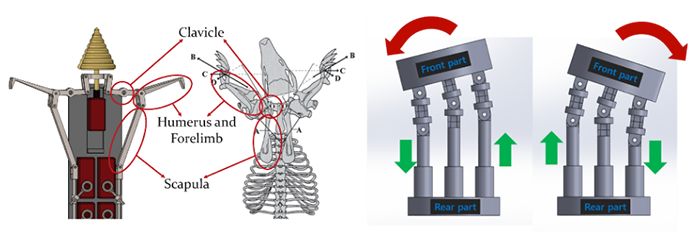
Chuột chũi châu Âu sử dụng hai chi trước lớn để khai quật. Các yếu tố chính liên quan đến hoạt động của chi trước là xương đòn, xương đùi và xương bả vai. Đặc biệt, vảy của nốt ruồi có hình dạng thuôn dài, không giống như hình dạng dẹt của xương vảy ở người. Bằng cách mở rộng diện tích bề mặt thông qua hình dạng như vậy, một số lượng lớn các cơ có thể được kết nối và kết quả là lực đào cao có thể được thực hiện so với kích thước cơ thể. Do đó, một cấu trúc có hình dạng thuôn dài, chẳng hạn như cấu trúc của loài chuột chũi, được thiết kế để khai thác một số động cơ. Do đó, một cấu trúc liên kết mô phỏng xương đòn và xương đùi được kết nối để mô phỏng chuyển động của các chi trước của chuột chũi. Cuối cùng, phần đầu của máy khoan định hướng ngang robot dẫn hướng được thiết kế dạng mũi khoan hình nón tương tự như đầu của các loại máy đào tự nhiên, có dạng hình tam giác.
Chuột chũi có thể tự do thay đổi hướng đào bên trong lỗ khoan vì eo của nó có độ tự do cao. Máy khoan ngầm định hướng ngang do nhóm nghiên cứu phát triển cũng có thể cung cấp khả năng định hướng thông qua chuyển động thắt lưng của khoan robot, giúp tạo điều kiện cho việc khoan định hướng. Con chuột chũi được phát triển bao gồm phần thân phía trước có cơ chế đào và phần thân phía sau đóng vai trò vận động và khóa. Hai cơ quan được kết nối với nhau bằng bốn bộ truyền động tuyến tính và các khớp nối vạn năng. Dựa trên vị trí thân sau, thân trước có thể được điều chỉnh tự do bằng cách điều khiển hành trình của từng bộ truyền động tuyến tính.

Ngoài nền tảng khoan ngầm định hướng bằng robot ( Công nghệ khoan ngầm kéo ống định hướng Horizontal Directional Drilling (HDD), nhóm đã phát triển công nghệ khoan ngầm nhận biết vị trí có thể được sử dụng trong môi trường dưới lòng đất, bao gồm đá và đất khiến rô bốt khó sử dụng Hệ thống Định vị Toàn cầu (GPS), WiFi hoặc Radio. Báo hiệu tần số (RF).
Do bên trong lỗ khoan hẹp và tối nên các cảm biến tầm nhìn và laser cũng khó sử dụng. Để khắc phục vấn đề này, SLAM dựa trên đồ thị được thực hiện bằng cách khớp dữ liệu từ trường của cảm biến Đơn vị đo lường quán tính (IMU) và đo mùi của bộ mã hóa dây kéo. Thông qua thuật toán được phát triển, vị trí của máy khoan định hướng ngang robot dưới lòng đất có thể được xác định vị trí. Tốc độ đào, góc định hướng tối đa và độ chính xác nội địa hóa của robot khoan ngầm được phát triển đã được xác minh bằng các thí nghiệm.
Nhóm hiện đang phát triển một cơ chế mũi khoan có thể mở rộng mới mô phỏng cấu trúc răng và hàm của chuột chũi để đào đất chắc, đảm bảo quá trình thi công khoan ngầm đặt đường ống được thuận lợi. Nhóm đã nhận được giải thưởng bài báo hay nhất tại hội nghị Viện Điều khiển, Người máy và Hệ thống (ICROS) lần thứ 34, năm 2019 và giải trình bày hay nhất tại Int’l Conf. trên RiTA (Công nghệ và Ứng dụng Trí tuệ Robot), Malaysia, 2018.

Có thể bạn muốn biết:
Phương pháp khoan qua đường bằng robot dẫn hướng HDD
Máy khoan định hướng ngang trong công nghệ khoan ngầm kéo ống
CÔNG TY CP TƯ VẤN ĐẦU TƯ VÀ THIẾT KẾ XÂY DỰNG MINH PHƯƠNG
Địa chỉ: 28B Mai Thị Lựu - Khu phố 7, Phường Tân Định, TP.HCM
Hotline: 0903 649 782 - 028 3514 6426
Email: nguyenthanhmp156@gmail.com
Website: www.minhphuongcorp.com - www.minhphuongcorp.net



HOTLINE

HOTLINE
0903 649 782




HOTLINE
HOTLINE
0903 649 782





